Building Your First SBA
Now that you know how SBA's work, it's time to create your own!
On our robot, we used SBA's to curl and uncurl our arm, which required several coordinated motions of both our arm and wrist to prevent damaging our robot.
For this example, we'll create a simpler SBA sequence for a simpler arm.
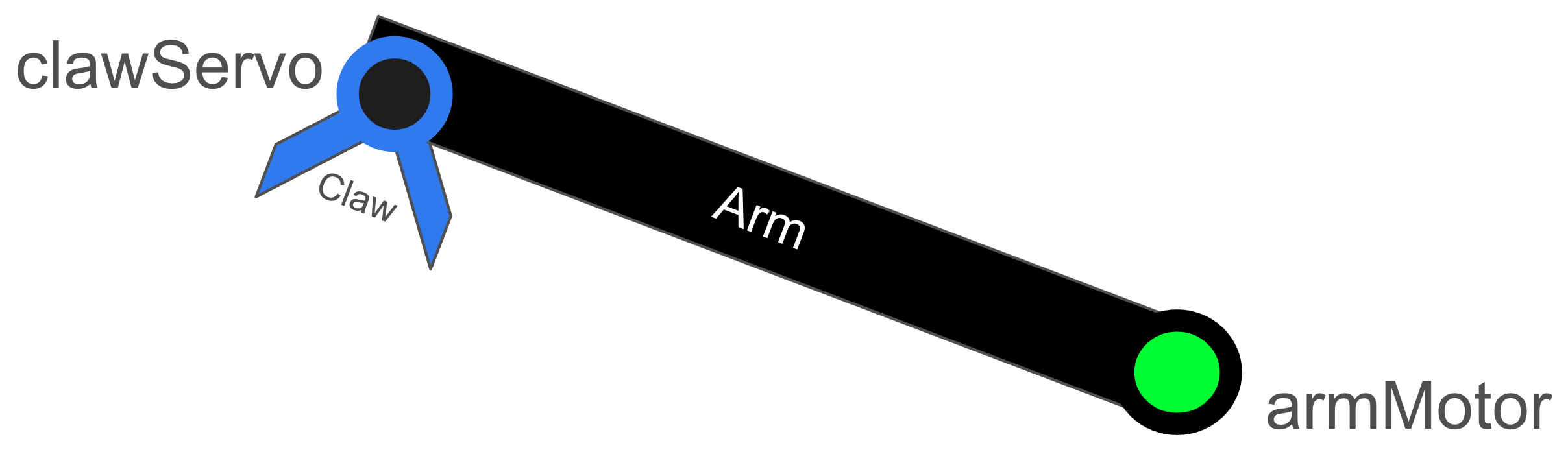
This arm has only one motor to move the arm, and one servo to open or close the claw.
Perform the Motion in Real Life
First, we need to perform the motion in real life. To do this, you'll need to add telemetry to your OpMode so we can gather positioning data.
Here's an example for the arm motor and claw servo:
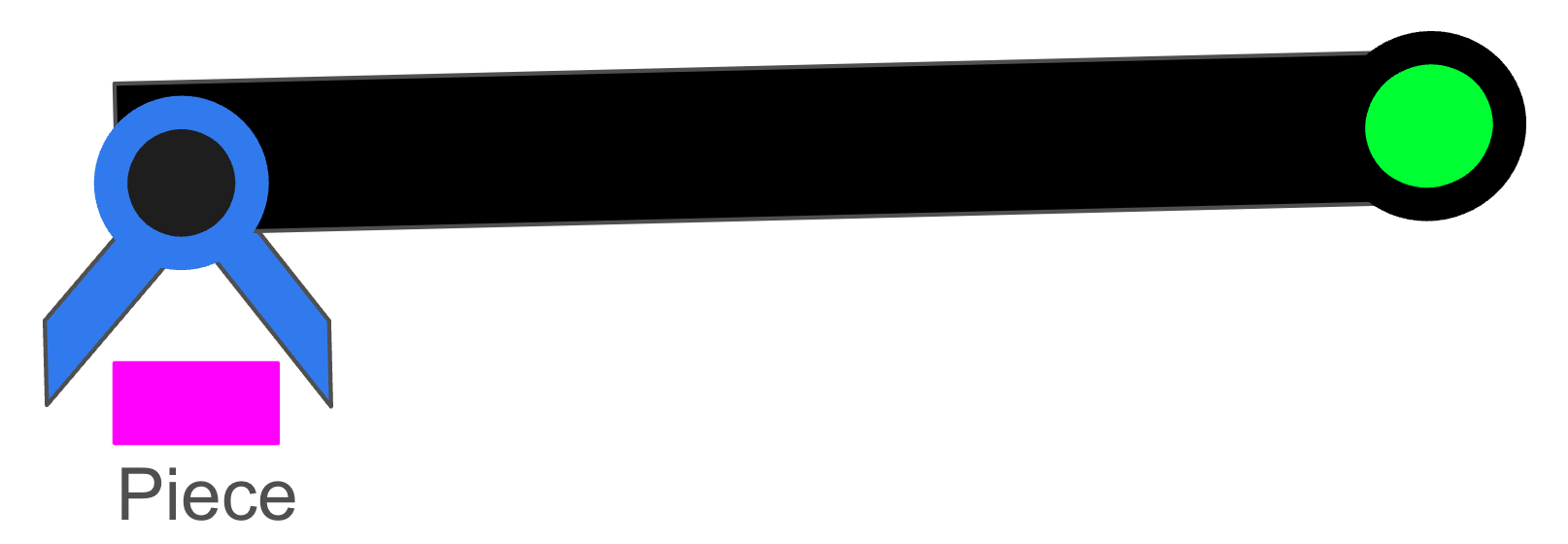
Now, using your existing controls, move the arm to the starting position, like in the above diagram.
Your telemetry should look something like this:
In this case, that means that the starting position is:
armMotorat100clawServoat1
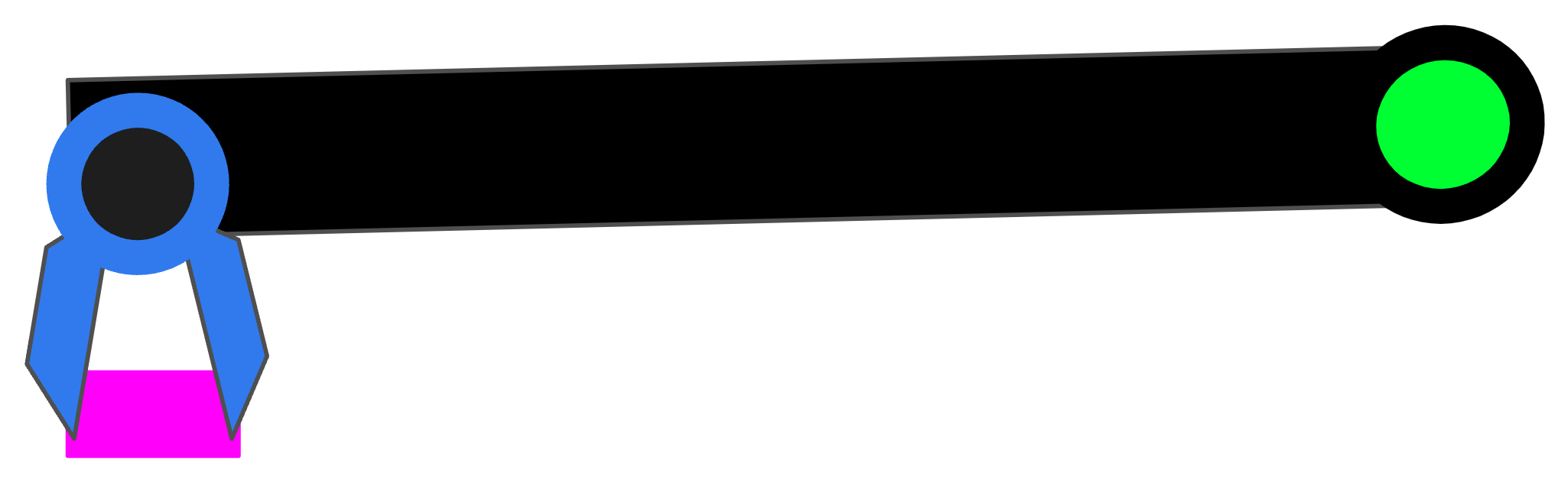
Now, continue with the motion. In this case, the next step is to move the arm down.
Check your telemetry.
The next step of our motion is:
armMotorto200
The next step is to close the claw.
Telemetry:
The motion is:
clawServoto0.5
Finally, we have to lift our arm back up to its starting position.

Telemetry:
The motion is:
armMotorto100
Now we that we recorded the motion in real life, it's time to turn it into code!
Converting to SBA's
In the previous section, we recorded the motion of the robot in real life. Now, we have to convert it to SBA's.
First, create a table like this:
| Step | armMotor |
clawServo |
|---|---|---|
| Start | 100 | 1 |
| Lower Arm | 200 | |
| Close Claw | 0.5 | |
| Lift Arm | 100 |
Any blanks in the table represent no change from the previous step.
Now, we'll go through each row and convert it to SBA's:
| Step | armMotor |
clawServo |
SBA |
|---|---|---|---|
| Start | 100 | 1 | new MotorSBA(armMotor, 0.5, 100)new ServoSBA(clawServo, 1) |
| Lower Arm | 200 | new MotorSBA(armMotor, 0.5, 200) |
|
| Close Claw | 0.5 | new ServoSBA(clawServo, 0.5) |
|
| Lift Arm | 100 | new MotorSBA(armMotor, 0.5, 100) |
For our arm power, we're using 0.5.
Finally, put these together in a list, and pass it to runSBAs()
You can attach this to a button on your controller, and...

It went through the motions, but the arm came up before the claw had a chance to close!
Waiting
Here's the issue: We command the claw to close (move to 0.5), but have no way of knowing when the claw actually finishes closing. To work around this, we need to add a wait after we close the claw. Luckly, we have a prebuilt WaitSBA ready to go!